Premiers pas avec HARP plateforme de robotique humaine avancée)
Cet article contient des instructions sur le fonctionnement de base et la configuration de HARP. À la fin, vous serez en mesure de commander à distance un robot connecté à votre système.
Avant de commencer
À ce stade, nous partons du principe que vous avez déjà configuré vos appareils en suivant les guides « Premiers pas avec Inverse3 » et « Premiers pas avec le stylet VerseGrip ».
Installation de HARP
Une fois HARP installé, lancez le programme d'installation. La procédure est simple et l'application s'ouvrira une fois l'installation terminée.
Image du HARP
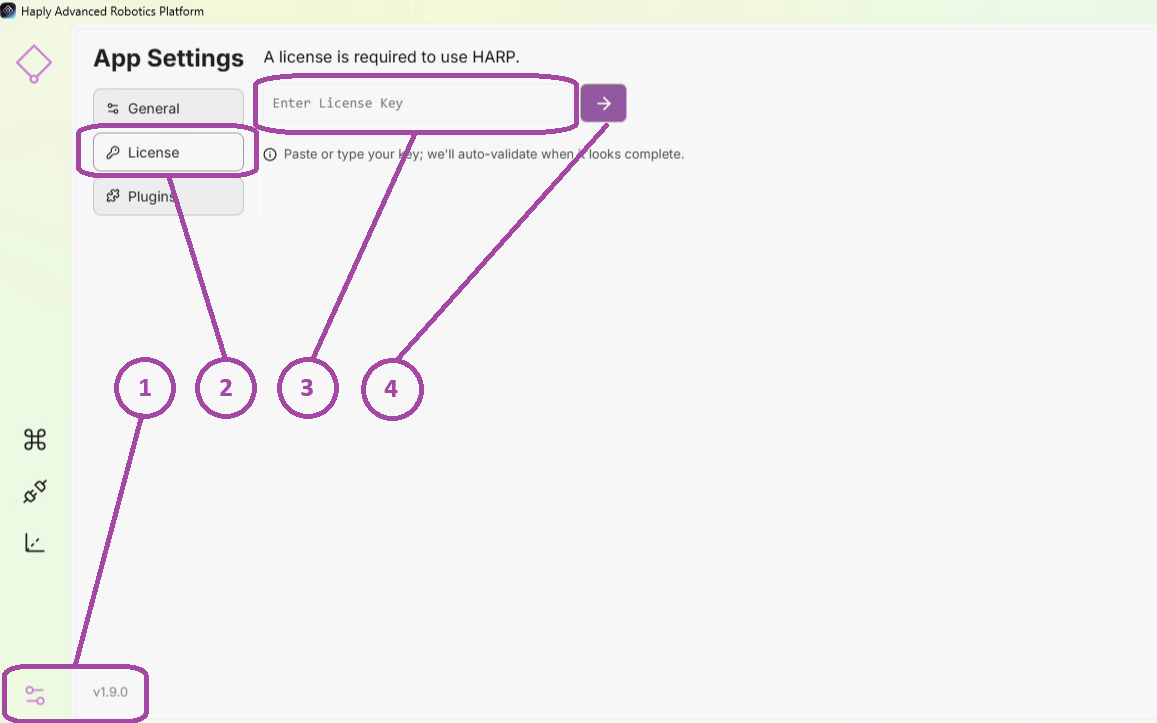
Validation de la licence
Une fois HARP , (1) accédez aux paramètres, puis (2) sélectionnez le menu « Licence ». (3) Saisissez votre clé de licence, puis (4) cliquez pour valider la licence.
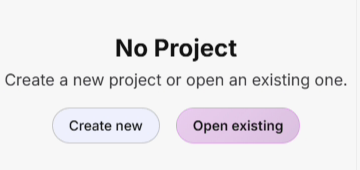
Créer un projet
Commencez par créer un nouveau projet. Donnez un nom au projet et sélectionnez le répertoire dans lequel il sera enregistré.
Dispositifs de connexion
Appareils de tête
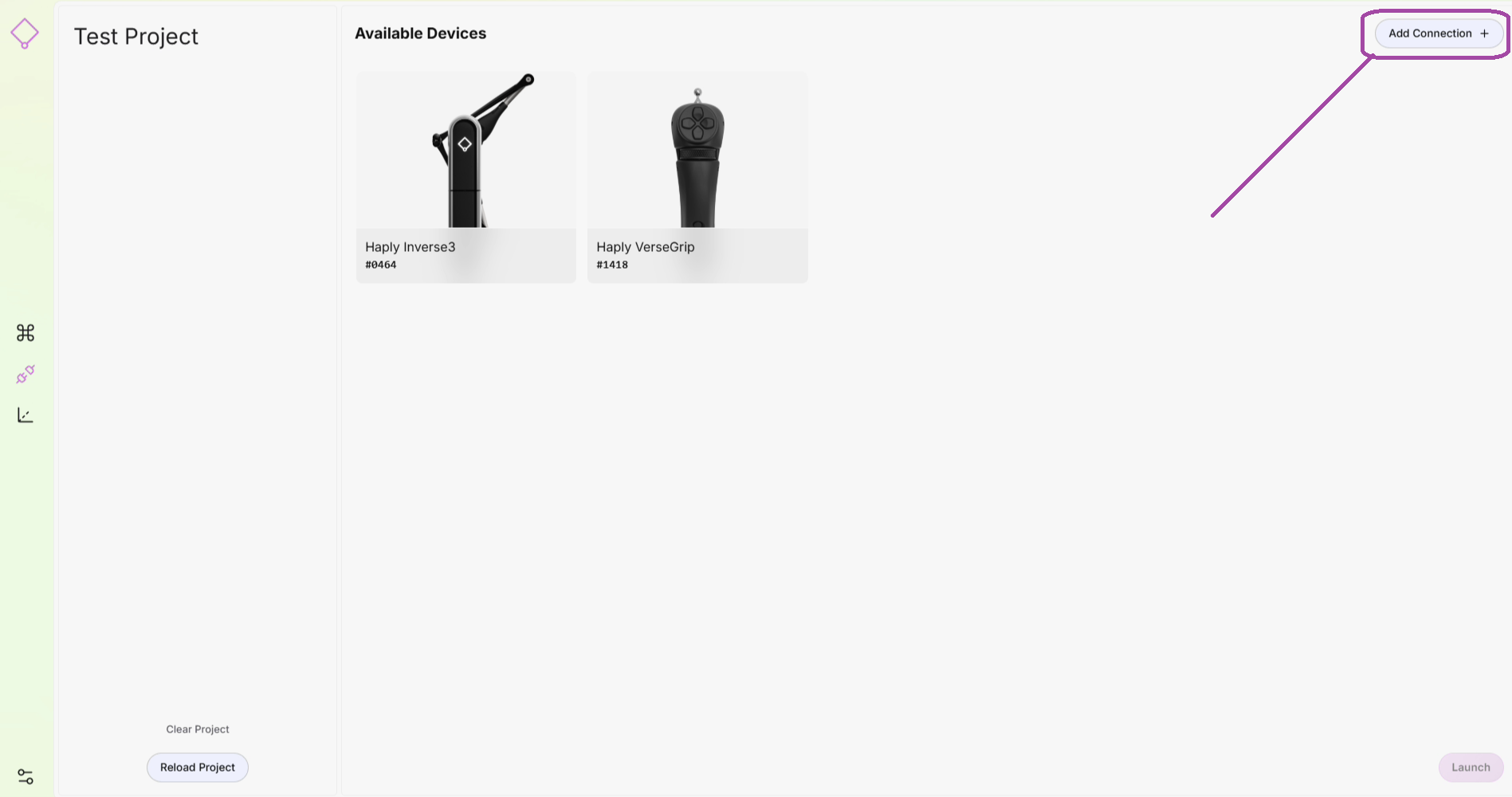
Assurez-vous que les appareils Leader sont bien connectés. Vous devriez voir Inverse 3 le VerseGrip s'afficher à l'écran. Si l'un de vos appareils n'apparaît pas, vérifiez qu'il est bien sous tension et assurez-vous que la clé USB du VerseGrip est bien branchée sur le PC.
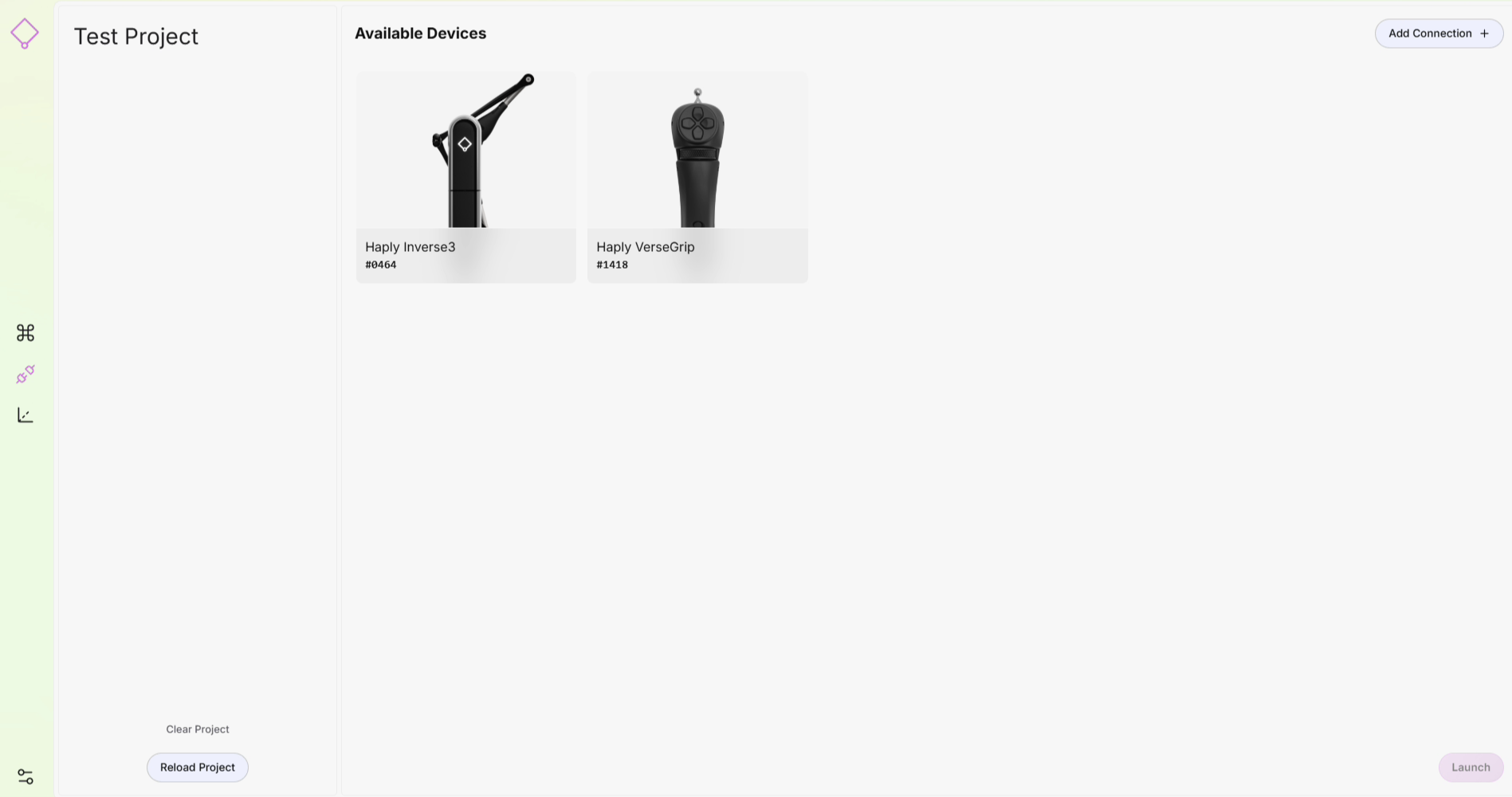
Appareils connectés
Pour connecter nos appareils esclaves, la fonction « Ajouter une connexion » nous permet de connecter des robots, des capteurs de force/couple et des effecteurs terminaux.
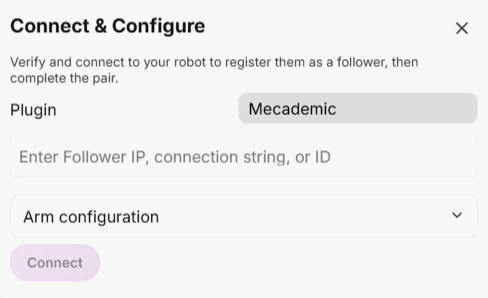
Commencez par le bras robotisé : sélectionnez le robot dans la liste déroulante et saisissez la chaîne de connexion. Cliquez sur « Se connecter ».
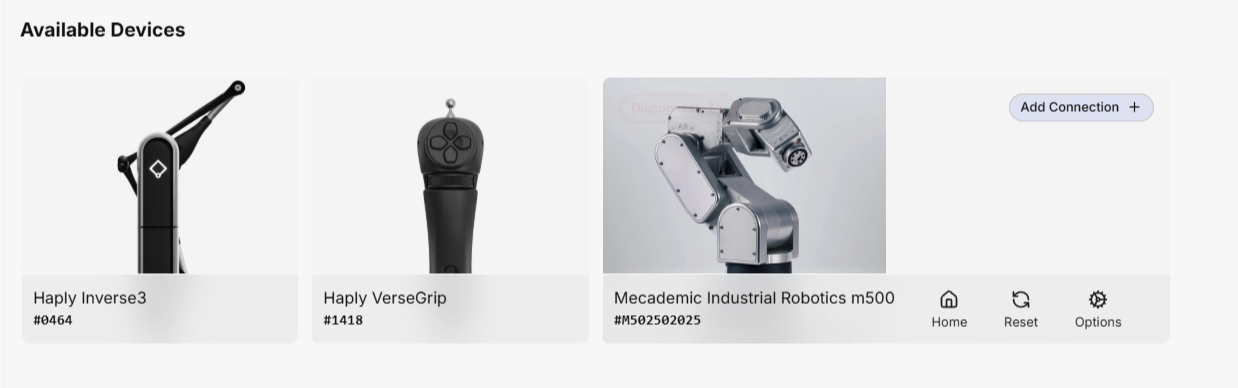
Ajoutez une pince, puis cliquez sur « Ajouter une connexion » dans la vignette du robot connecté.
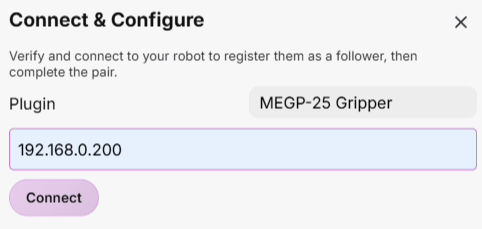
Sélectionnez un effecteur terminal dans le menu déroulant et saisissez la chaîne de connexion. Cliquez sur « Se connecter ».
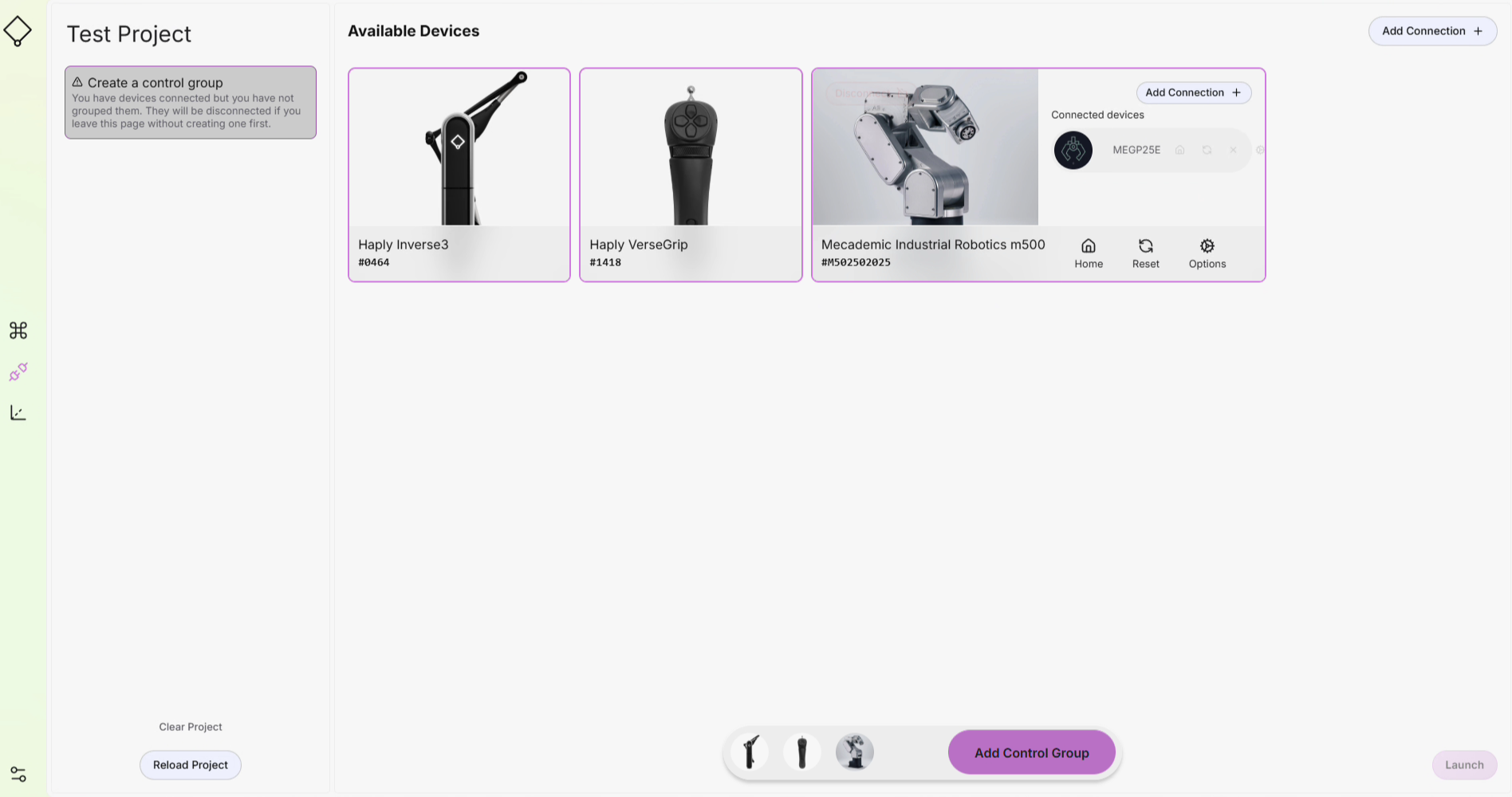
Maintenant que vos appareils sont allumés et connectés, créons un groupe de contrôle. Cliquez sur chacune des vignettes des appareils que vous souhaitez inclure dans votre groupe de contrôle. Elles s'afficheront en bas de l'écran. Une fois que vous les avez sélectionnées, cliquez sur le bouton « Ajouter un groupe de contrôle ».
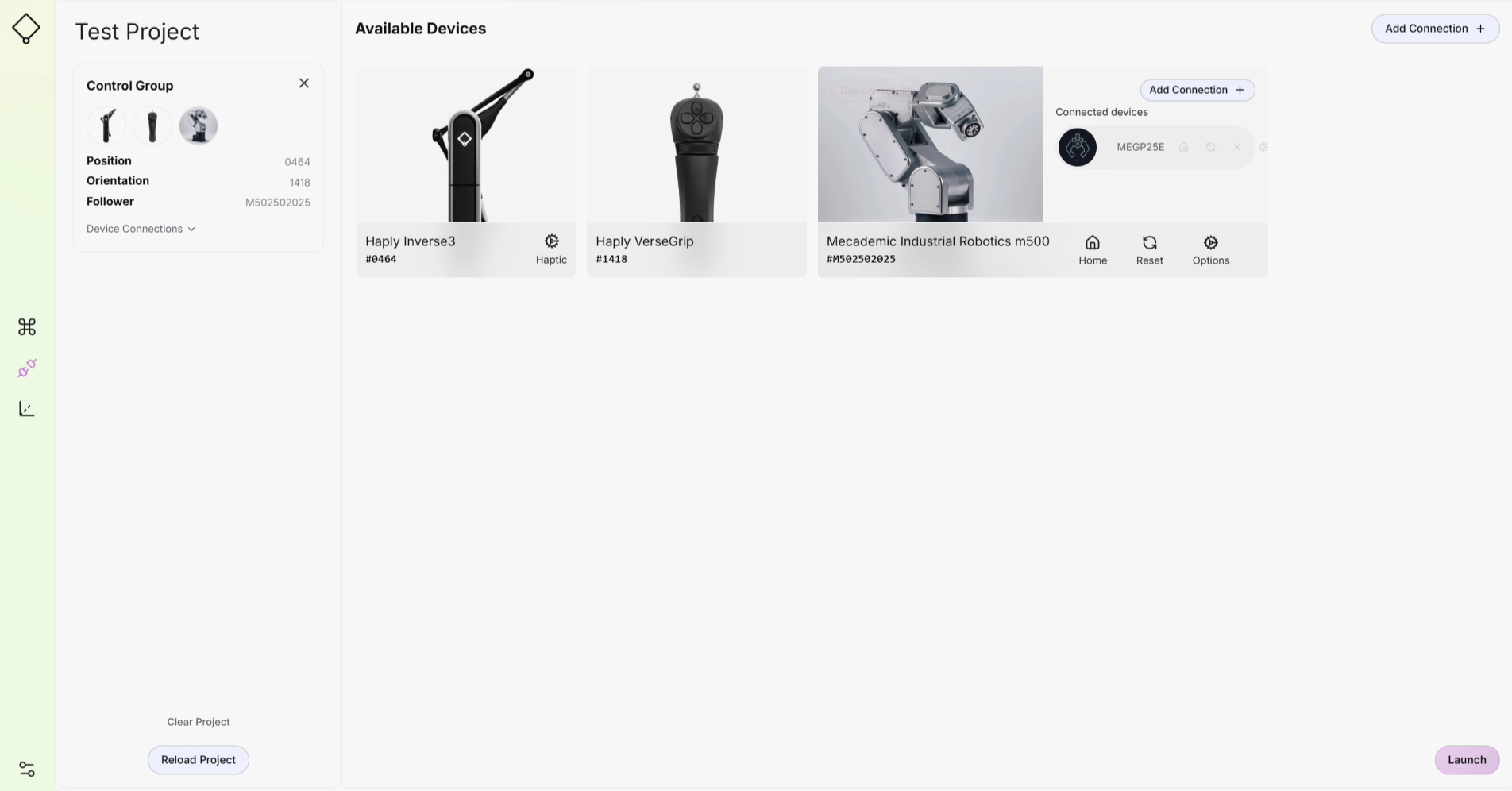
Vous verrez le groupe de contrôle dans le volet du projet situé à gauche.
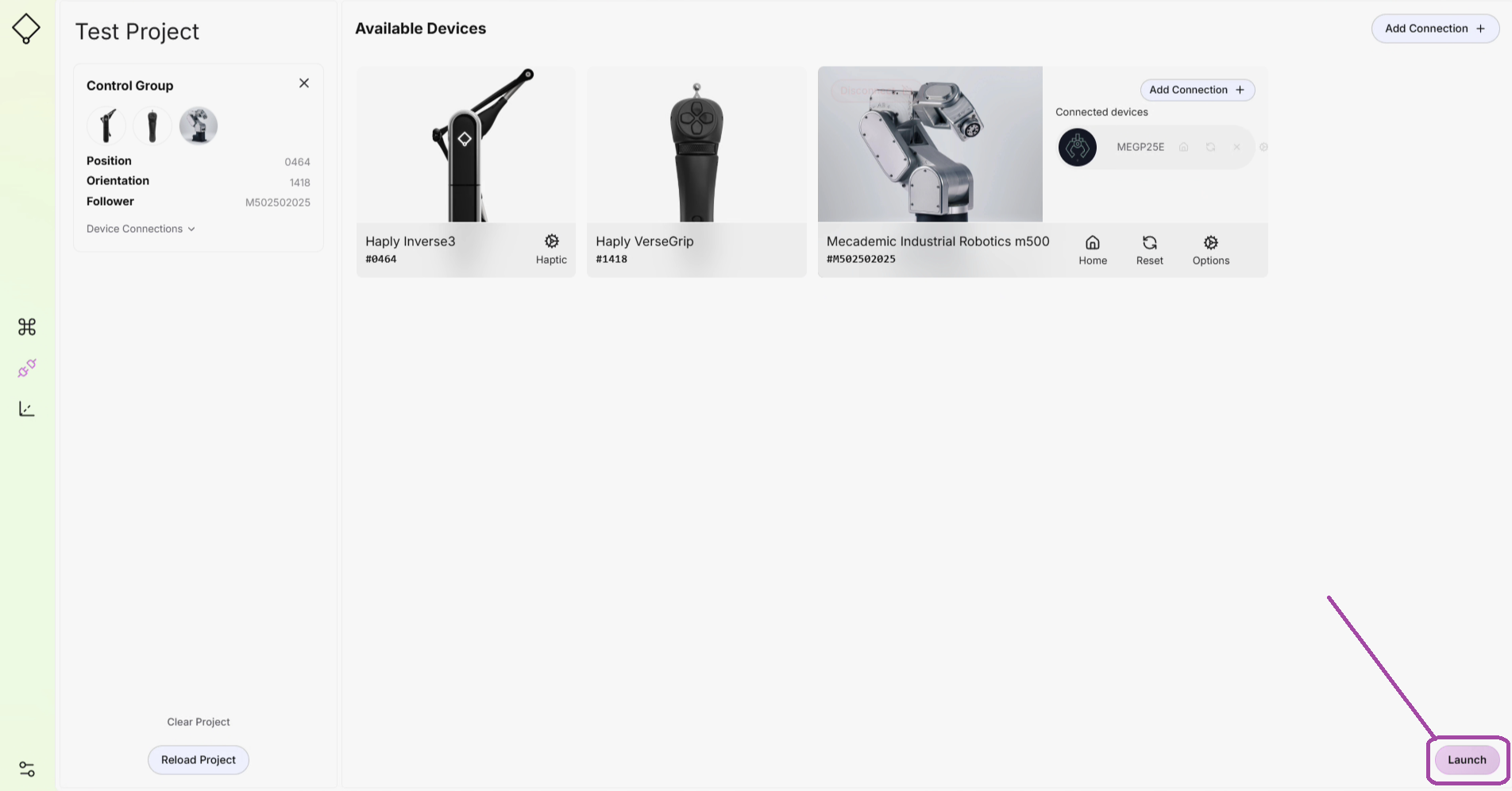
Vous avez réussi à tout connecter ; appuyez sur le bouton « Lancer » pour accéder à l'écran de commande, où nous pourrons faire bouger le robot
Commande à distance
Pour l'instant, vous n'avez fixé aucune limite, aucune restriction. Soyez prudent, allez-y doucement et familiarisez-vous avec le fonctionnement du système avant de vous lancer dans des opérations de contrôle plus complexes.
Le bouton STOP (en bas à droite) permet à l'utilisateur d'arrêter le robot jusqu'à ce que le bouton RESET soit actionné. (La touche Échap permet également d'arrêter le robot)
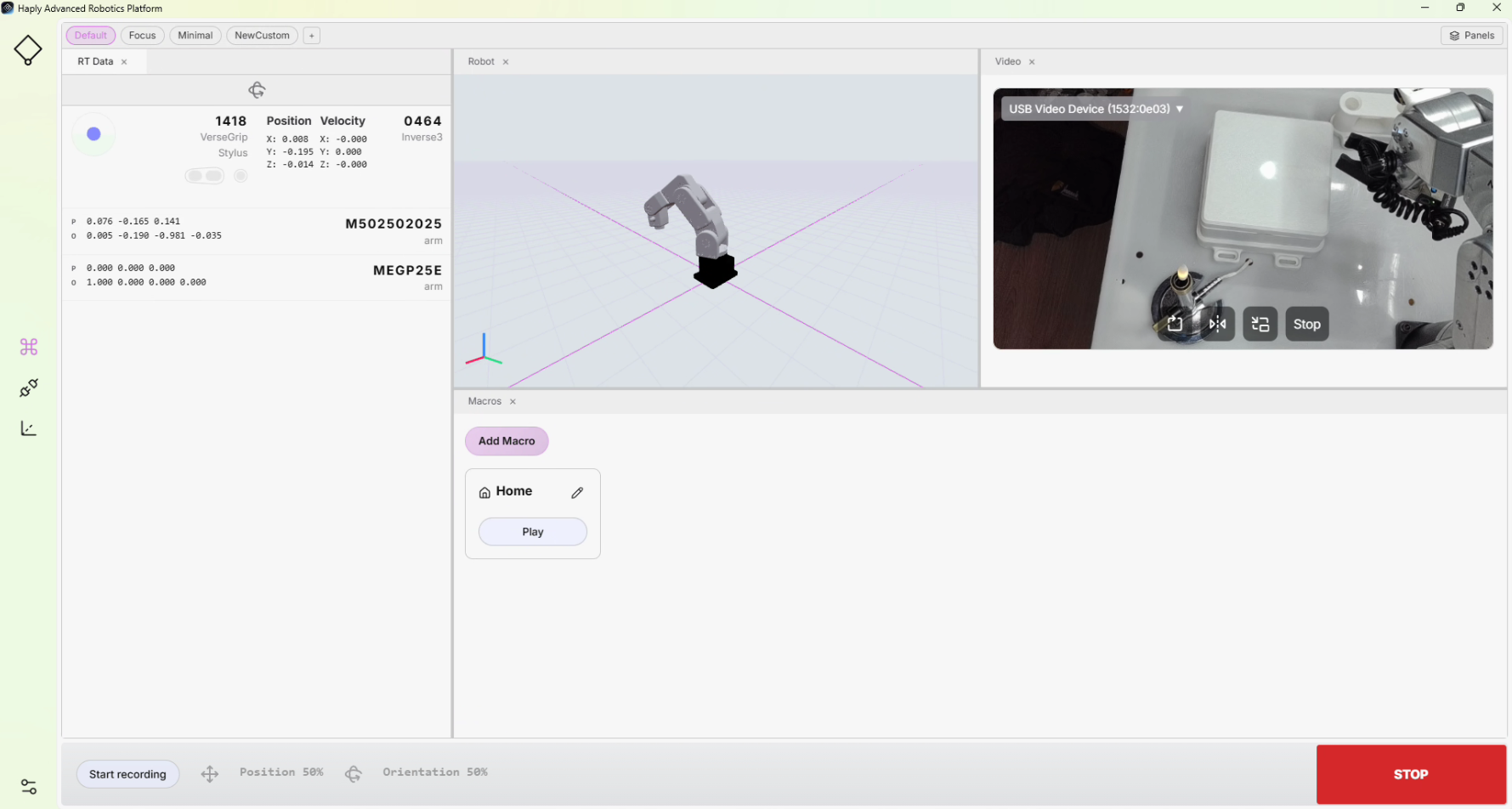
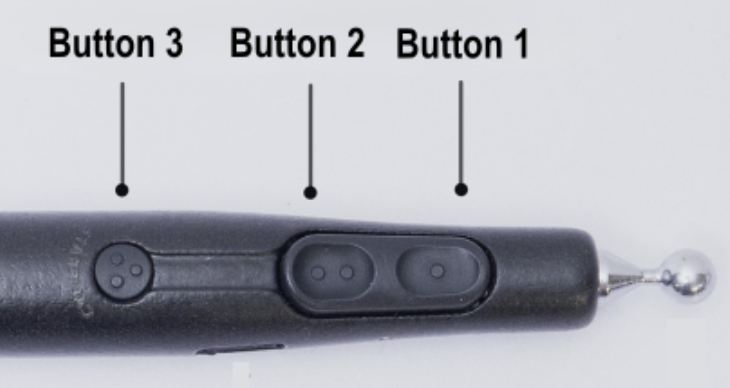
Le VerseGrip utilise le bouton 1 pour l'embrayage.
- L'embrayage n'est PAS enfoncé — Vous pouvez déplacer l'appareil librement sans que le robot ne bouge.
- Bouton d'embrayage enfoncé — Le robot se déplace en même temps que Inverse 3 .