Démarrer avec le package Inverse Unity
Ce guide décrit la configuration de base et fournit un exemple simple pour démontrer l'utilisation fondamentale de Haply Inverse Unity Package, y compris l'installation du package, la configuration d'une plateforme haptique et la création de scripts simples pour le contrôle de la force et de la position.
Pour plus de détails et de techniques avancées, consultez les didacticiels.
Soutien à la version
- Unity 2021.3.x LTS : pris en charge
- Unity 2022.3.x LTS : pris en charge
- Unity 2023.x.x (Tech Stream) : Expérimental
- Haply Inverse SDK2.0.0 ou supérieur
Conditions préalables
- Installer la Haply Inverse SDK version 2.0.0 ou supérieure.
- Assurez-vous que le service inverseHaply est opérationnel.
- Confirmez que vos appareils Inverse3 et VerseGrip sont connectés et calibrés avant de lancer la scène.
Le paquet est en développement continu afin d'améliorer la prise en charge du site Inverse3. Pour obtenir de l'aide, faire part de vos commentaires ou de vos demandes, veuillez nous contacter.
Installation
Le package Inverse Unity est disponible via le Scoped Registry de Unity. Pour intégrer le paquetage :
-
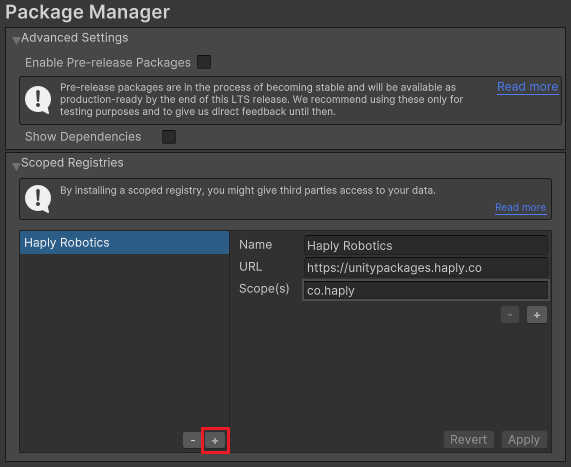
Ouvrez Edit > Project Settings > Package Manager. Ajoutez un nouveau Scoped Registry avec :
- Nom :
Haply Robotics - URL :
https://unitypackages.haply.co - Portée(s) :
co.haply
- Nom :
-
Accès Fenêtre > Gestionnaire de paquets, cliquez sur le bouton ajouter + et sélectionnez Ajouter un paquet par nom. Entrer
co.haply.inverseet cliquez sur Ajouter.
Une fois l'installation réussie, le gestionnaire de paquets affichera le paquet Inverse.
Mise en place de la plate-forme haptique
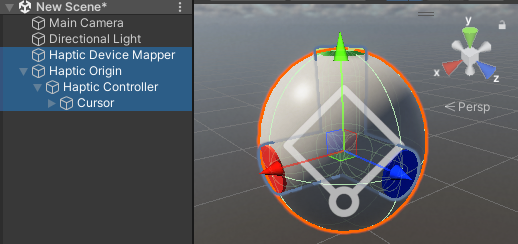
Pour créer un Haptic Rig, naviguez vers GameObject > Haply Inverse > Haptic Rig (une main). Cette action permet d'assembler un environnement complet avec le contrôleur Inverse3 et le VerseGrip.
Votre scène comprendra désormais
- Haptic Device Mapper: Gère l'attribution des appareils avec le service inverséHaply .
- Origine haptique: Échelle et position de l'installation haptique dans la scène.
- Contrôleur haptique: Gère la force ou la position du curseur en fonction des données de l'appareil Inverse3 et des données de l'appareil VerseGrip.
- Curseur: Contient les composants Inverse3Cursor et VerseGrip Cursor pour la représentation de la scène.
Pour plus de détails sur les composants du paquet, voir la page de documentation sur l'architecture globale.
En mode lecture, la sphère se déplace et tourne en synchronisation avec le curseur et l'orientation de VerseGrip. Inverse3 et l'orientation de VerseGrip.
Mode de contrôle de la force
Créer un ForceControl.cs C# et l'attacher au fichier Origine haptique GameObject.
Ce script vous permet d'appliquer des forces au Inverse3 à l'aide des curseurs de l'inspecteur.
using Haply.Inverse.Unity;
using UnityEngine;
public class ForceControl : MonoBehaviour
{
[Range(-2, 2)]
public float forceX;
[Range(-2, 2)]
public float forceY;
[Range(-2, 2)]
public float forceZ;
private Inverse3 _inverse3;
private void Awake()
{
_inverse3 = GetComponentInChildren<Inverse3>();
}
protected void OnEnable()
{
_inverse3.DeviceStateChanged += OnDeviceStateChanged;
}
protected void OnDisable()
{
_inverse3.DeviceStateChanged -= OnDeviceStateChanged;
_inverse3.Release();
}
private void OnDeviceStateChanged(Inverse3 inverse3)
{
inverse3.CursorSetForce(forceX, forceY, forceZ);
}
}

Explication du scénario
-
forceX, Y, Z: Composants du vecteur de force réglables à l'aide de curseurs, garantissant que les forces restent dans les limites de sécurité avant d'être transmises à l'unité de commande.CursorSetForceméthode. Il est également possible d'utiliser uneVector3pourrait être utilisé. -
Awake(): Récupère le Inverse3 du GameObject actuel ou de son enfant. -
OnEnable(): Enregistrer leOnDeviceStateChangedde la mise à jour haptique dans un thread séparé après l'exécution de la fonctionAwakeet à chaque fois que le script est activé. -
OnDisable(): Désenregistre le callback et réinitialise la force lorsque le script est désactivé ou que l'application s'arrête. -
OnDeviceStateChanged: Recherche leforcede la fenêtre de l'inspecteur et le transmet à la fenêtre de l'inspecteur. Inverse3 en utilisant leCursorSetForceméthode.IMPORTANT : Le callback est déclenché par le thread haptique à une fréquence élevée, comprise entre 4 et 8 kHz. Il est essentiel de veiller à ce que tout le code de ce rappel soit hautement optimisé.
Utilisation
Avant d'entrer en mode lecture, assurez-vous que vous maintenez le curseur. L'appareil doit passer à l'état de contrôle de la force, indiqué par un voyant vert. Vous pouvez alors naviguer dans l'espace de travail de l'appareil en ajustant la force de sortie à l'aide des curseurs.
L'ajustement des forces entraîne le déplacement du site Inverse3 . Veillez à ce que votre espace de travail soit dégagé et tenez toujours le curseur. Pour les consignes de sécurité, reportez-vous à l'article "Utilisation sûre".
Mode de contrôle de la position
De même, créez un PositionControl.cs script C# pour contrôler la position de l'appareil et l'attacher à l'écran de l'appareil. Origine haptique Objet du jeu.
using Haply.Inverse.Unity;
using UnityEngine;
public class PositionControl : MonoBehaviour
{
[Range(-0.1f, 0.1f)]
public float positionX;
[Range(-0.1f, 0.1f)]
public float positionY;
[Range(-0.1f, 0.1f)]
public float positionZ;
private Inverse3 _inverse3;
private void Awake()
{
_inverse3 = GetComponentInChildren<Inverse3>();
}
protected void OnEnable()
{
_inverse3.DeviceStateChanged += OnDeviceStateChanged;
}
protected void OnDisable()
{
_inverse3.DeviceStateChanged -= OnDeviceStateChanged;
_inverse3.Release();
}
private void OnDeviceStateChanged(Inverse3 inverse3)
{
var position = inverse3.WorkspaceCenterLocalPosition + new Vector3(positionX, positionY, positionZ);
inverse3.CursorSetLocalPosition(position);
}
}
Assurez-vous que le script ForceControl ou tout autre script contrôlant l'appareil est désactivé.

Comme dans l'exemple précédent :
- Utiliser
positionX, Y, and Zpour régler le position en utilisant les curseurs en mode lecture.L'option sélectionnée
Range(-0.1, 0.1)correspond à peu près à la position maximale réalisable. - Les
Awakerécupère la méthode Inverse3 de la composante. - Les
OnEnableenregistre la méthodeOnDeviceStateChangedde la mise à jour haptique dans un thread séparé après l'exécution de la fonctionAwakeet à chaque fois que le script est activé. - Les
OnDisabledésenregistre le rappel et réinitialise la force lorsque le script est désactivé ou que l'application s'arrête.
Il existe toutefois des différences :
- Les
OnDeviceStateChangedà chaque image haptique, prend le vecteur de position de la fenêtre de l'inspecteur, l'ajoute au vecteur de position de la fenêtre de l'inspecteur.WorkspaceCenterLocalPosition, et l'envoie à l'adresse Inverse3 à l'aide de la fonctionCursorSetLocalPositionméthode.
Avant d'entrer en mode lecture, maintenez le curseur près de la position centrale. L'appareil doit passer à l'état de contrôle de position (indiqué par une lumière bleue). Vous pouvez alors explorer l'espace de travail de l'appareil en ajustant la sortie de position à l'aide des curseurs.
Lorsque vous ajustez la position, le site Inverse3 se déplace. Veillez à ce que l'espace de travail soit libre de tout objet de valeur et tenez toujours le curseur. Pour plus d'informations, reportez-vous à l'article sur la sécurité d'utilisation.